张少鹏

研究经历
2024.09 - 至今
基于 Booster T1等人形机器人运动仿真控制系统
项目负责人
关键词:
项目介绍:基于Issac gym、MuJoCo类人机器人仿真平台,完成类人机器人踢球、跑步等仿真动作训练开发以及7人制足球对战策略优化,在2025 RoboCup人形机器人足球世界杯中获得全国一等奖。
- 基于强化学习方法(PPO),结合Body States等多重观测空间与多元Reward Function对机器人的动作网络进行训练。借助拓展多元observation维度输入和动态课程学习,成功将1.5m/s的走路动作优化至2.8m/s的跑步动作。
- 利用观测空间对齐与关节 PD 控制校准,将训练好的动作网络迁移(Sim-to-Sim)至比赛仿真环境中。通过对网络输入进行预处理,经二次优化得到了走路、跑步、带球、远踢(可踢20m)、近踢等动作。
- 基于A*等路径规划算法,在走路、跑步等动作中融入避障等功能,实现了动态路径规划。
- 基于Python开发整套比赛代码框架,涉及Debug工具优化、7人制足球攻、守策略优化等工作。

2023.09 - 2025.09
基于STM32、ESP32等单片机的轮式自主对抗机器人
项目负责人
关键词:
项目介绍:以擂台竞技为模拟场景,通过搭载多种传感器模块和高效算法设计,使机器人具备实时感知擂台环境、自主规划路径、快速登台、精准对抗的能力,在2025华北五省机器人大赛中获得北京市亚军。
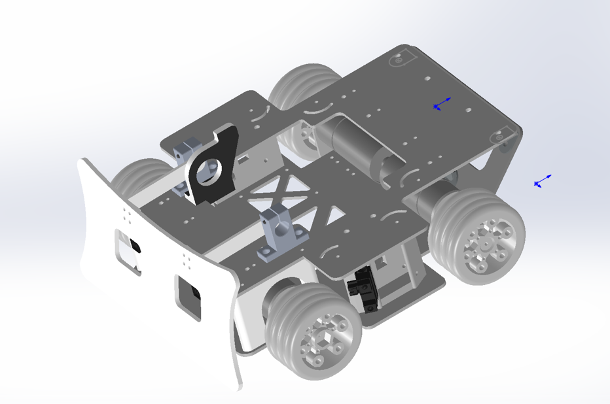
- 基于 STM32、ESP32单片机实现策略控制,协调多传感器与执行器,自主研发出登台、循台、对手识别及障碍物检测等核心功能。
- 利用 MPU6050 陀螺仪实时采集机器人姿态数据,经二次滤波确保数据精度,实时获取机器人当前状态。
- 基于六轴加速度计、光电传感器、红外传感器、单片机、电机驱动等硬件模块进行PCB设计。
2025.11 - 至今
基于NVIDIA边缘计算平台AGX Thor 的功能开发
独立开发者
关键词:
项目介绍:基于NVIDIA边缘AI计算平台AGX Thor(Thor于2025年推出,前代为AGX Orin),实现模型推理、视觉感知等多个独立项目的功能测试与开发。
- 基于 Thor、D435i 双目深度相机、四轴机械臂、ROS通信、YOLO分割模型,实现对空间中目标物体的三维识别与触碰。
- 基于Thor、OpenClaw(龙虾)、四轴机械臂,通过skill开发,完成对机械臂的纯文本语义控制,能够实现空中绘图等功能。
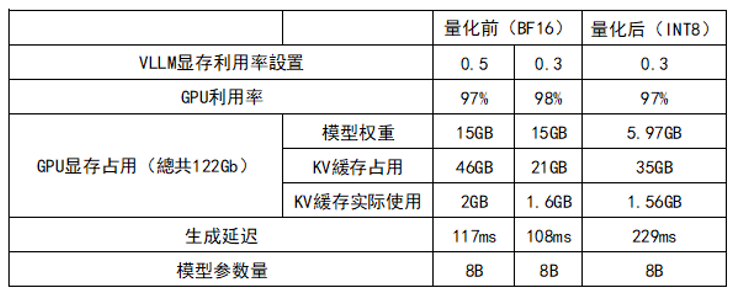
- 基于vLLM框架,完成Qwen、Llama等LLM的FP16/FP8/INT8/INT4多精度本地部署和性能测试。
- 基于CUDA 13、Aarch64架构,完成Ubuntu系统刷机、工具链安装、Docker、TensorRT GPU推理等裸机环境配置。